FesRobex Exoskeleton
Introduction
-
Empowering robotic exoskeletons: These kinds of robots are known as extenders since they extend the strength of the human hand beyond its natural ability while maintaining human control of the robot.
-
Orthotic robots: An orthosis maps the anatomy of a limb to restore lost functions. The robotic counterpart of orthosis is robotic exoskeletons that complement the ability of the limbs. Exoskeletons are also capable of restoring handicapped functions.
-
Prosthetic robots: These robots are devices that fully substitute lost limbs [1].
Figure 1shows two examples of wearable robots. The scientific community differentiates exoskeletons from orthosis by defining the former as the devices that enhance the physical capabilities of wholesome users and the latter as the devices that assist persons with limb impairments [2]. Specifically, in Figure 1, the lower extremity of an orthotic exoskeleton for mobility problems is presented as developed by the authors, and the lower extremity of a prosthetic robot, according to work in [1], is presented in Figure 1 b. Despite their differences, both devices act in parallel with the limb. In the medical field, in combination with rehabilitation therapies, exoskeletons can help patients with spinal cord injuries, strokes, and lower limb paralysis caused by hemiplegia [1].
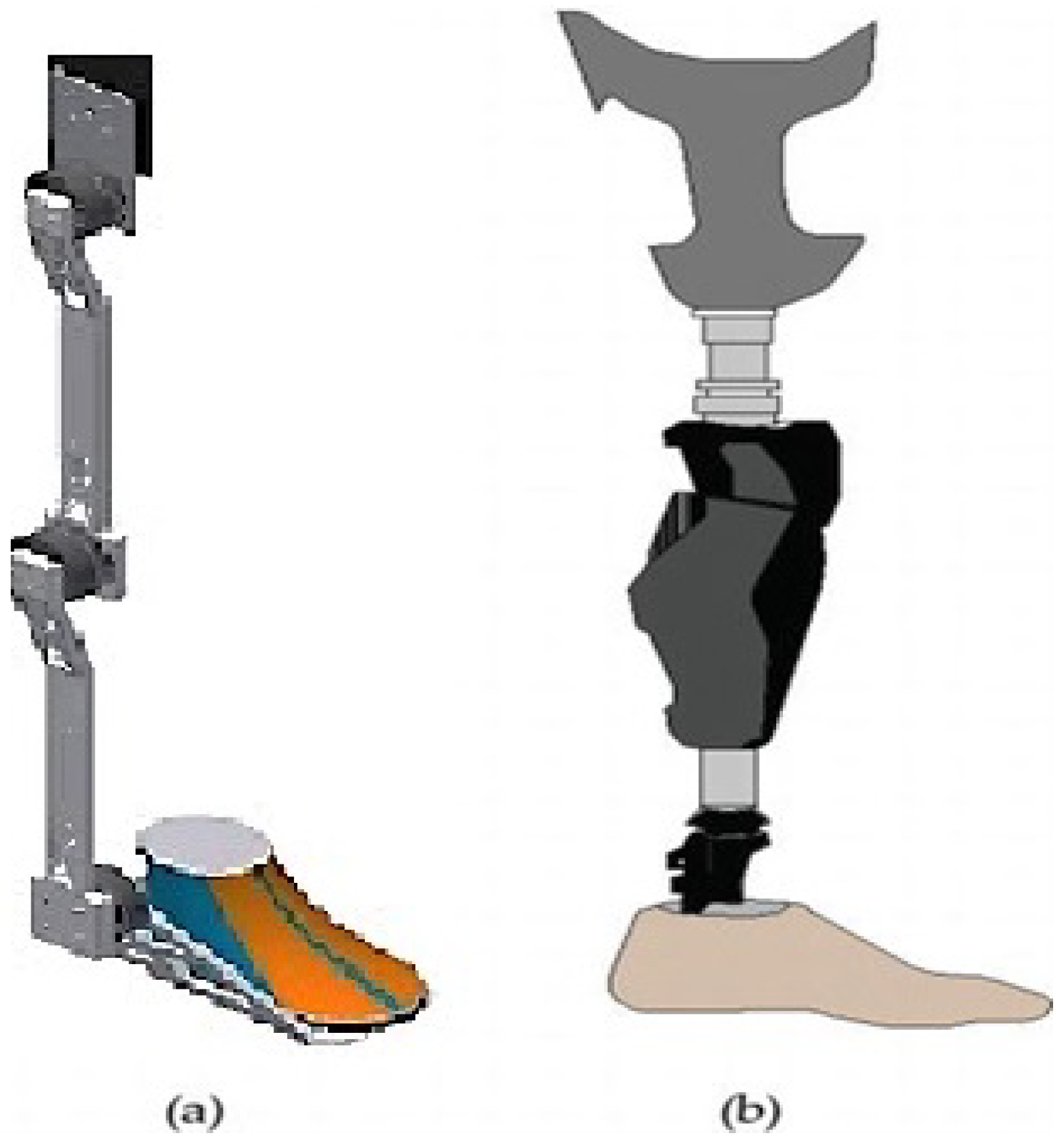
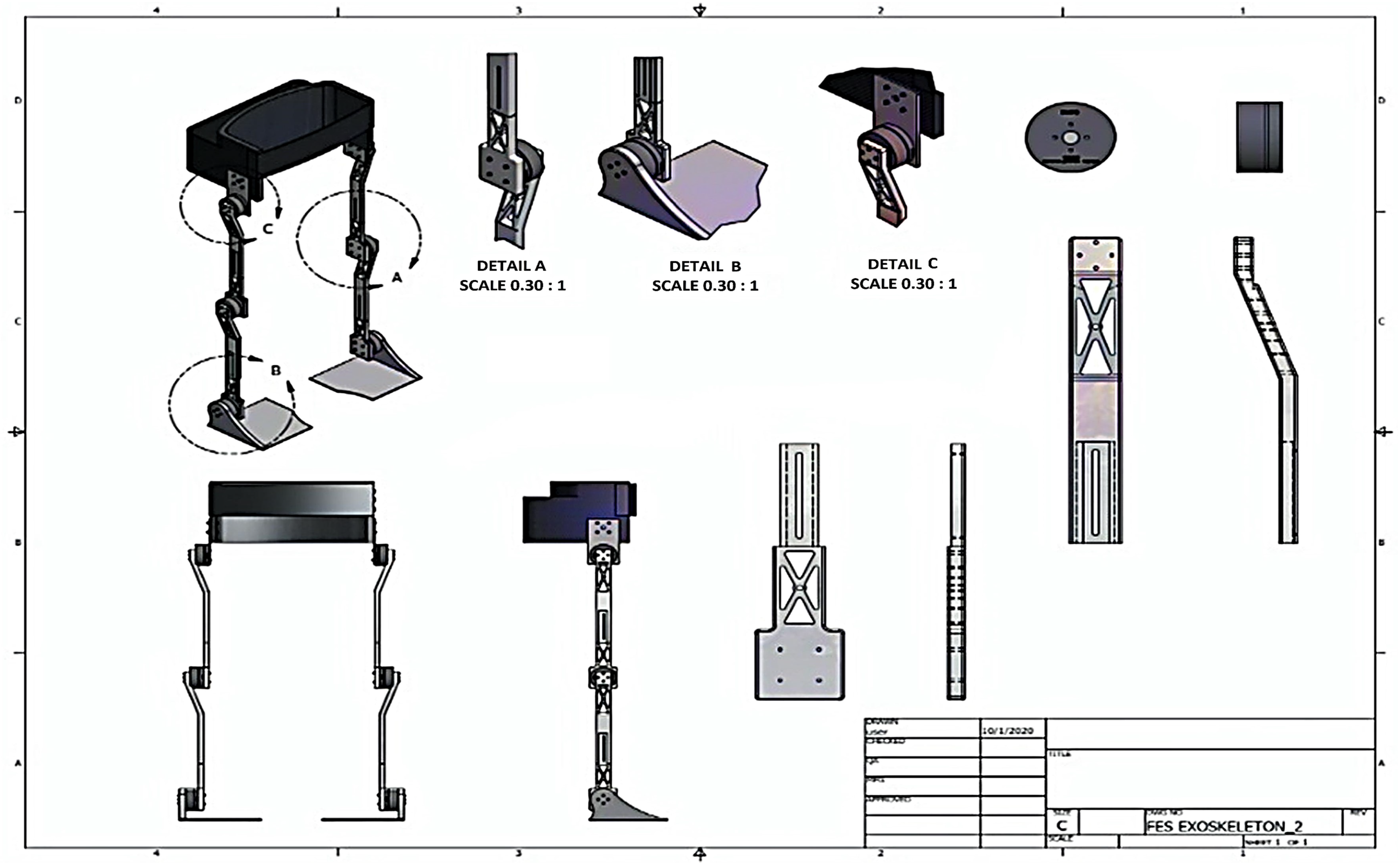
Figure 2 shows the robotic exoskeleton drawing showing the joints of the actuators. We are developing a hybrid rehabilitation system (FesRobex) combining Functional Electrical Stimulation (FES) and an exoskeleton to control patients’ gait with lower limb mobility problems.
Robotic Exoskeleton Features
Exoskeletons are anthropomorphic mechanical devices worn by an operator that closely match the body's anatomy
and work in coordination with the user’s movements. Among the main requirements of an exoskeleton
to be taken into account when designing are the following:
The design must be anthropomorphic: Current designs have an abnormal
shape another limitation of exoskeletons is the lack of direct exchange
of information between the human nervous system and the wearable robotic part.
The design must be flexible: The length of the thigh, stem, and waist must be adjustable,
and the variation in length and the stem is approximately 6 cm for average people,
from 1.60 to 1.80 m. The length of the torso is approximately 0.246 times the height,
and the length of the thigh is about 0.245 times the height.
Increase joint strength: Exoskeletons do not transfer the substantial load to the ground but augment joint torque.
This consideration might be used to reduce joint pain or increase joint strength in paralysed or weak joints.
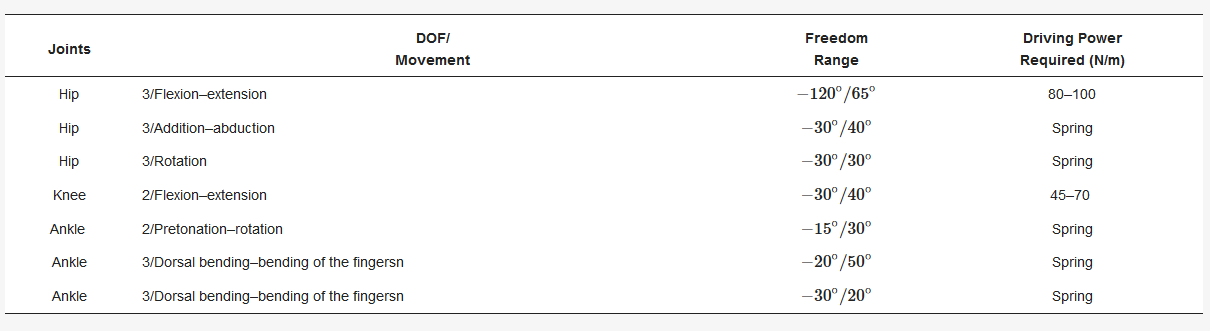
Selection of Degrees of Freedom (DoF): The exoskeleton must comply with the free movement of the joints.
Table 3
shows the DoF of a lower extremity exoskeleton.
The exoskeleton robot actuator: It must have a high output-to-weight power ratio and features such as low inertia,
fast response, high accuracy, etc.
[1].
Table 3. DOF design for lower extremity exoskeleton