
ROBOTIC EXOSKELETONS WORLD
ELECTROMYOGRAPHY SYSTEM (EMG)
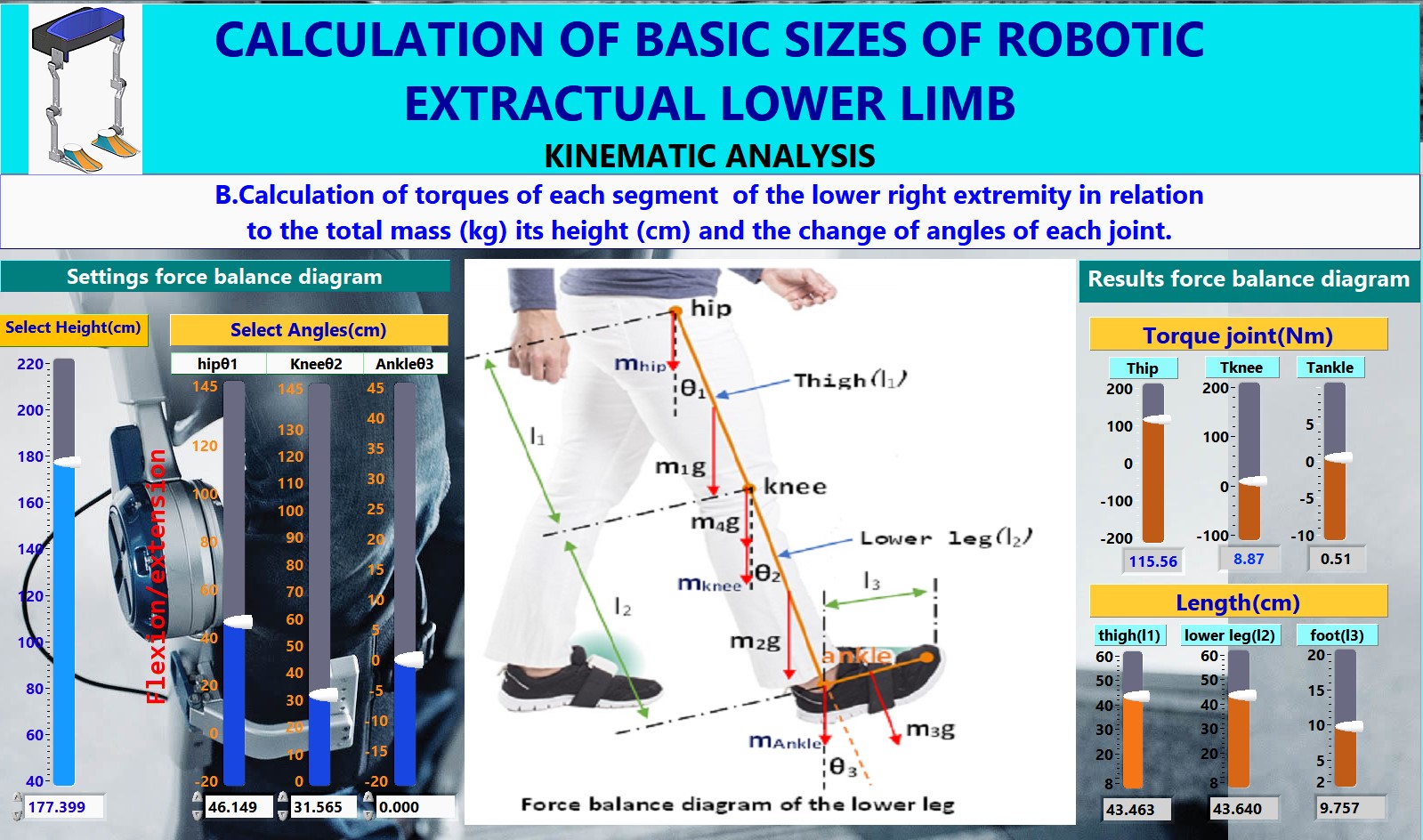
FESROBEX TORQUE JOINTS CALCULATION
Description
As a significant cause of functional loss, stroke often makes it difficult for patients to walk and drop foot spasms that can occur in any muscle in the body; leg muscles are most commonly affected in patients with multiple sclerosis. Therefore, interventions to enhance movement rehabilitation in patients should be performed urgently. However, knee muscle activity is usually too weak to produce prominent movements, which is a challenge for early post-stroke rehabilitation training. Although controlled electromyography (EMG) exoskeletons have the potential to solve this problem, most existing robotic devices in rehabilitation centres are expensive, technologically complex, and allow only low-intensity training. The research aims to create a Hybrid operating system of electrical stimulation (Fes) and a robotic exoskeleton that will help treat gait disorders, balance and coordination of movements. FES is the use of electricity to produce a functional sequence of motions that could not otherwise occur. The hybrid system (FesRobex) will suit many patients with gait disorders. In addition, it can be used by patients with stroke, multiple sclerosis, Parkinson’s disease, paraplegia, and other neurological and orthopaedic diseases. Robotic and functional electrical stimulation (FES) approaches correct the gait disorder. Although the devices are commercially available, issues still need to be resolved. The control of hybrid exoskeletons aims to mix robotic and electrical stimulation to overcome the disadvantages of each approach while maintaining their advantages. Hybrid activation and control have significant remedial capabilities on foot. Still, there is a need for new hybrid control systems strategies that adequately manage the balance between FES and robotic controllers. Furthermore, the combination of FES and robotic control is a complex issue due to the non-linear behaviour of the stimulated muscles and the need for more developments in the hybrid control field.
Problem Definition
Compared to functional electrical excitation (FES), the robot system uses the motor to provide external auxiliary torque to the end. It does not have the effect as in FES, which directly activates a person's muscular strength to create the Auxiliary force. However, it could also be difficult to use FES to activate muscle groups for dynamic limb movements, as it is difficult for FES to control the rate at which individual muscles contract, mainly due to the reverse motor uptake sequence, compared to it involuntary muscle contractions. It is also worth exploring the effectiveness of physical training from these combined systems if sensory-motor experiences of limb movement combined with repetitive FES muscle practice can lead to more effective recovery after unpredictable acute episodes of neurological symptoms (relapses) for people with drop foot mobility problems. The research proposal aims to study existing FES systems and recovery robots and compare them, to propose a higher-level system that synchronizes the FES subsystems and the recovery robot with an automatic control system.